Summary
Updates18
Forum43
Teams1.8K
Resources
Meet the Winners
Summary
Overview
The goal of NASA’s Artemis program is to land the first woman and the next man on the surface of the moon in 2024. By the end of the decade, NASA wishes to create a sustainable base camp on the lunar surface which will serve as a hub for scientific research and can also be a base for future exploration of Mars. A critical component of this program's success is the delivery of supplies and systems to the lunar surface and eventually Mars.
Building a base camp on the moon is no small task! From small scientific instruments to large rovers and habitat modules, the Artemis program will need a robust and reliable cargo-handling system that can effectively operate in the lunar environment and is compatible with a broad array of lunar lander configurations. NASA welcomes ideas that address how to unload payloads from the lunar landers.
Payloads of varying mass and volume will be sent to the moon in one of several commercial landers and once they arrive at the lunar South Pole, they need to be unloaded. These landers will range in size depending on the program requirements, so ideally the solution should be flexible enough to handle a variety of payloads being off-loaded from a range of different vehicles. Current Earth-based logistics systems are too massive to easily be packaged and deployed on the lunar surface. This is why we are asking for your help! We are looking for practical and cost-effective solutions to unload payloads to the lunar surface.
Landing on the moon in 2024 and establishing a sustained human presence will be one of the most challenging logistical efforts ever attempted. NASA is excited to get your ideas on systems that will make lunar exploration a reality.
What You Can Do To Cause A Breakthrough
Click the orange button below to sign up for the challenge
Share this challenge on social media using the icons above. Show your friends, your family, or anyone you know who has a passion for human exploration of space.
Start a conversation in our Forum to join the conversation, ask questions or connect with other innovators.
Guidelines
Background
We are going to the moon, to stay. As the future of a lunar outpost unfolds, NASA is teaming up with commercial partners who will supply the landers and capabilities for the delivery of payloads. Most recently, NASA has selected three providers for human landers (HLS) as well as commercial lunar payload service providers (CLPS) for robotically delivering payloads to the lunar surface (learn more about lunar deliveries on Houston we have a Podcast).Once the cargo has landed, they will need a system to unload the payloads from the landers onto the lunar surface. NASA is looking for autonomous or semi-autonomous, scalable systems that can be launched, landed, and deployed without crew set up that could support a wide range of payloads and landers. Ideally the solution would be fully autonomous so it can operate without human interaction for several years; however, ideas that are not fully autonomous are also acceptable if they have the potential to become autonomous. Manual operations in nominal and off-nominal conditions are also desired, but not required.
The images below show examples of the three human landers and are meant to offer further insights into potential height and volume conditions that landers may impose. Future cargo landers are subject to change.
NASA has selected three American companies – Blue Origin, Dynetics, and SpaceX – to design and develop human landing systems for the Artemis program. With these awards, NASA is on track to land the next astronauts on the lunar surface by 2024, and establish sustainable human exploration of the Moon by the end of the decade. For more information about the human landers and Commercial Lunar Payload Services (HLS and CLPS) please visit the HLS website and the CLPS website. Credits: NASA
As Albert Einstein said, “Everything should be made as simple as possible, but no simpler.” Before investing in and building a large-scale logistics infrastructure, NASA wants to engage the community for ideas that provide highreliability. Solutions can be part of the lander, located separately on the lunar surface, or be a combination of approaches.
The environment on the moon is distinctly different from Earth’s. Among other things, the lunar environment has no atmosphere, broad temperature swings, reduced gravity, abrasive dust, and uneven terrain with potential obstacles. Proposed ideas should consider how systems would work in such conditions.Also, note that landers must land well away from key infrastructure to reduce the risk of damaging it.
NASA has developed some concepts and prototype systems for handling cargo from lunar landers. While these systems are effective at some operations, they may not optimize cost, mass and simplicity. Before baselining a large scale system, NASA is seeking ideas from the public to inform the direction of future development. For this challenge, NASA is looking for concepts and innovative approaches that may have been proven in other fields, or are based on sound reasoning and proven methodologies. Such approaches typically have a Technology Readiness Level (TRL) of 3-4; however, solutions with lower TRLs are acceptable. See the Resources tab for complete definitions of TRLs.
The payloads will range in size and shape and can be categorized into three mass classes: <2 metric tons, 2-8 metric tons, and 8-12 metric tons. Ideally, NASA would like solutions that can handle multiple classes of payloads so that the system can be broadly used. Solutions that are able to successfully unload one class are also acceptable. For the purpose of this challenge, these payloads can be considered black boxes so that the focus is on how the design addresses either one or multiple payload classes. The figure below provides examples of possible payloads in the different classes. A detailed list of specific examples of payloads is available in the Resources Tab.
The individual components of the unloading system you propose are intended to be sent to the moon in a lunar lander and must fit inside the payload fairing of the launch vehicle. It is important to consider how the mass and volume of your system impacts what else can fit inside the payload fairing and how this impacts mission operations. For instance, you could propose an unloading system that takes up most of a lander’s payload mass but could be left on the moon and used for many deliveries. You could also propose an unloading system that takes up only a small portion of the lander’s payload fairing and may be brought on every trip, leaving room for other payloads.
For the purposes of this challenge, you can broadly assume that the payload fairing can accommodate a total of 3-5 metric tonnes and has a diameter of 5-8 meters. There is potential to have your unloading system shipped on a larger lander if the cost of doing so is justified by the value your system brings. You can learn more about the different launch options and estimated capacities in the SLS (Mission Planner’s Guide) or the guides for commercially available launch vehicles. Optimizing mass and volume for the overall mission in this way will be an important factor of a successful submission. Since launch vehicles also have challenging volume constraints, packaging efficiency of your concept will be very important. As a reminder, mass and volume are related but not always correlated - consider the difference in volume between a kilogram of feathers and a kilogram of lead!
Standardizing interfaces is a priority for NASA when designing a logistics infrastructure on the moon. The Artemis program is an international one, and integration of different elements on the lunar surface requires a variety of compatible mechanical and electrical interfaces. Imagine seamless integration of systems on the Moon. Just like the iPhone or Android phones having the ability to be charged by USB or being made to a certain spec so that they can use a standard phone cover, your ideas should consider how they can efficiently interface with a variety of systems. The types of landers and payloads will vary. For cargo applications, features such as power standards, robotics interfaces, and external mounting interfaces will need to be defined and optimized. Ideas should include suggestions for how these parts of the system can be standardized. This includes not only the unloading system but also ideas on how the lunar payloads can be packaged and configured on a lander to simplify offloading.
Additional capabilities that are desired but not required as part of your submission include:
Solutions that have the capability to load payloads for return to Earth
Solutions that have the capability of transporting payloads from landers to point of use
The system provides an option for the crew to provide override capability
You can assume the following will be provided:
Power for unloading systems from the lander on which they are mounted and/or from a power source/charging station at the Artemis base camp
Commanding and telemetry systems to Earth-based ground control
Camera systems on the spacecraft and/or lunar surface to provide insight for cargo operations
Cargo operations are conducted during illuminated periods at the Artemis Base Camp for remote visibility
Prize
This challenge will award up to $25,000 in total prizes to up to 6 teams:
One First place winner will be awarded up to $10,000
Two Second place winners will each be awarded up to $4500 ($9,000 total for Second place prizes)
Three Third place winners will each be awarded up to $2,000 ($6,000 total for Third place prizes)
In addition to the prizes discussed above, winners may also receive the following non-monetary incentives:
An opportunity to meet with NASA engineers to more fully present the concept and answer any questions
If available, a conference or virtual event that allows all prize winners to present their ideas to and interact with NASA technical staff (some State Department restrictions may apply)
A press release or other publicity by HeroX and/or NASA announcing the winners
Wide promotion of the winner on social media channels including Facebook, Twitter, and LinkedIn
Participation in a webinar to showcase the winning solutions to the public.
Timeline
Open to submissions: October 29, 2020
Submission deadline: January 19, 2021 @ 5pm ET
Judging: January 19 to March 9, 2021
Winners Announced: March 16, 2021
How do I win?
To be eligible for an award, your proposal must, at a minimum:
Satisfy the Judging Scorecard requirements
Thoughtfully address the Submission Form questions
Be scored higher than your competitors!
Judging Criteria
Section
Description
Overall Weight
Reliability/ feasibility
Level of robustness; high degree of confidence that device or technique will be able to offload payloads.
30
Case for Mass and Volume Optimization
Idea considers mass and volume: case is made for either leaving a solution on the moon or including it in the lander or a combination of approaches.
25
Autonomy
The degree to which the technique can work autonomously or has the potential to work autonomously
15
Proposal quality
Quality of proposal: clear, concise writing; thoughtful and complete explanations of how the unloading design concept meets the specifications listed.
10
Flexibility of design
The design considers the ability to work with a variety of payloads and landers. Proposes recommendations for standardizing mechanical and electrical interfaces.
10
Applicability to the lunar surface
Ideas consider lunar environment factors such as: thermal, temperature, solar, dust, vacuum, etc.
10
While complete solutions are likely to score higher in the judging criteria, NASA is also interested in partial solutions. If you have a partial solution, we recommend forming a team to submit a complete approach.
Submission Form
Please complete your submission on the HeroX platform. We recommend opening the submission form early so you understand what formatting options are available to you. You can edit your submission up to the deadline, even if you have already submitted it. Character limits include spaces.
While not required, if you have CAD files, please include a PDF export and neutral 3D CAD files such as STEP (.stp and .step), Wavefront (.obj), or IGES (.iges and .igs).
Technical Abstract: The Technical Abstract should be contained in a single paragraph. Focus on delivering a compelling overview so that the Judging Panel members assigned to score your application will want to read more. This is your opportunity to make a strong first impression, so make every word count! (max 1000 characters)
Technical Approach: Provide a description of your concept and how it will unload payloads from lunar landers. Describe if the solution is standalone, part of the landers or a combination of both. Include any inputs that you think your solution will require, such as power consumption. Discuss the strengths and weaknesses of your approach, including any technical risks. (max 5000 characters, embedded images okay)
Concept of Operations depicting how the proposed solution would be employed. (max 1500 characters, embedded images okay)
Lunar Environment: Describe how the concept will work in the lunar environment with conditions such as vacuum, dust, solar, thermal, etc. (max 2000 characters, embedded images okay)
Case for Mass and Volume Optimization: How does your solution optimize for mass and volume? As a reminder, your solution will need to be sent to the moon in the payload fairing. You can make a case for leaving a larger/heavier system on the moon, including a lighter/smaller solution in the lander on every trip, or a combination of approaches. If possible, please provide an estimate of mass and volume in your response. (max 2000 characters, embedded images okay)
Reliability: Please discuss the reliability of your solution and offer any justifications for why you believe that your solution can successfully unload payloads. (max 1500 characters, embedded images okay)
Autonomy: Please describe how your solution works autonomously. If not yet autonomous, please describe how your solution could be made to work autonomously. (max 1500 characters, embedded images okay)
Capabilities: Can your design work with a variety of payloads and landers? What mass and volume of payloads do you think your system can handle? From what range of heights can your system unload payloads from? Do you have any recommendations for how to standardize mechanical and electrical interfaces to increase the flexibility of your solution? (max 1500 characters, embedded images okay)
Additional Information: Upload any additional information you’d like to share including; product brochures, datasheets, ppts, links to videos, design documents etc.
If you have multiple files, please upload them in a ZIP file.
The content included in your submission form should stand alone. The information you share here may not be reviewed in the preliminary judging round.
Please discuss the technical maturity of your proposed solution. What TRL would you assign it? Please provide a supporting rationale and/or evidence for this rating. View the TRL definitions here: https://www.herox.com/LunarDelivery/resource/573)
Sketches/Diagram or Designs of Concept. Upload multiple files in a ZIP folder. If you have CAD files, please include a PDF export and neutral 3D CAD file such as:
STEP (.stp and .step)
Wavefront (.obj)
IGES (.iges and .igs
Rules
Participation Eligibility:
The Prize is open to anyone age 18 or older participating as an individual or as a team. Individual competitors and teams may originate from any country, as long as United States federal sanctions do not prohibit participation (see: https://www.treasury.gov/resource-center/sanctions/Programs/Pages/Programs.aspx). If you are a NASA employee, a Government contractor, or employed by a Government Contractor, your participation in this challenge may be restricted.
Submissions must originate from either the U.S. or a designated country (see definition of designated country at https://www.acquisition.gov/far/part-25#FAR_25_003), OR have been substantially transformed in the US or designated country prior to prototype delivery pursuant to FAR 25.403(c).
Submissions must be made in English. All challenge-related communication will be in English.
You are required to ensure that all releases or transfers of technical data to non-US persons comply with International Traffic in Arms Regulation (ITAR), 22 C.F.R. §§ 120.1 to 130.17.
No specific qualifications or expertise in the field of mechanical sensors is required. NASA encourages outside individuals and non-expert teams to compete and propose new solutions.
To be eligible to compete, you must comply with all the terms of the challenge as defined in the Challenge-Specific Agreement.
Intellectual Property
Innovators who are awarded a prize for their submission must agree to grant NASA a royalty-free, non-exclusive, irrevocable, worldwide license in all Intellectual Property demonstrated by the winning/awarded submissions. See the Challenge-Specific Agreement for complete details.
You may be required to complete an additional form to document this license if you are selected as a winner.
Registration and Submissions:
Submissions must be made online (only), via upload to the HeroX.com website, on or before 5:00 pm ET on January 19, 2021. No late submissions will be accepted.
Selection of Winners:
Based on the winning criteria, prizes will be awarded per the weighted Judging Criteria section above.
Judging Panel:
The determination of the winners will be made by HeroX based on evaluation by relevant NASA specialists.
Additional Information
By participating in the challenge, each competitor agrees to submit only their original idea. Any indication of "copying" amongst competitors is grounds for disqualification.
All applications will go through a process of due diligence; any application found to be misrepresentative, plagiarized, or sharing an idea that is not their own will be automatically disqualified.
All ineligible applicants will be automatically removed from the competition with no recourse or reimbursement.
No purchase or payment of any kind is necessary to enter or win the competition.
Now that NASA's Lunar Delivery Challenge is complete...
It's time to start looking for your next NASA opportunity! We're thrilled to announce that NASA's Future-Scaping Our Skies Challenge has just launched over on this challenge page! Help the Convergent Aeronautics Solutions team at NASA build a better understanding of the future of aviation - mapping its relationship with societal, economic, technological, environmental, political, and regulatory trends.
Help us build a better understanding of the future so we may take better action today. Share your predictions for the ways that key trends in technology, our society and business may impact long term needs for aviation. Make a difference by helping us think ahead – the future of aviation is everyone’s reward (and you might just win a prize while you're at it)!
Note that this challenge is only open to submissions from the United States. Please check the challenge guidelines for further clarification on competitor eligibility.
We had the pleasure of sitting down with the 1st and 2nd place winners of NASA's Lunar Delivery Challenge to learn more about their solutions. If you missed our webinar, you can watch the recording here:
This Thursday, March 25th at 4 pm EDT (New York), we'll be sitting down with the NASA team and the first and second place winners of the Lunar Delivery Challenge for a round table discussion.
Register now to learn more about the winning solutions and the teams that created them. Reserve your seat here.
We are proud to announce the winners in NASA's $25,000 Lunar Delivery Challenge!
This challenge tasked innovators from around the world to propose solutions to unload cargo from lunar landers.
By the submission deadline, we received over 220 submissions. In total, NASA is awarding $25,000 USD across six different entries and recognizing an additional six entries with an honorable mention award.
You can view more details on the winning entries here.
We will also be hosting a panel discussion with NASA and the 1st and 2nd place winners - register here.
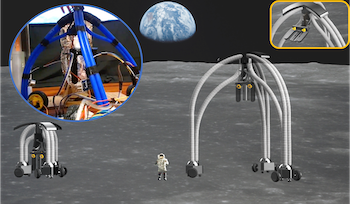
First Prize, $10,000
Lightweight Inflatable Delivery System (LIDS) by Lauren Fell
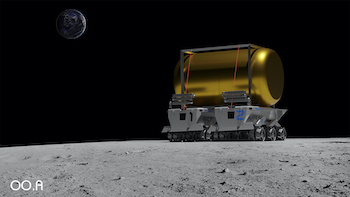
Second Prize, $4,500
OO.A - The mOOngoAt by Team FRD
Scalable Payload Delivery System (SPaDes) by Team SPaDes
Third Prize, $2,000
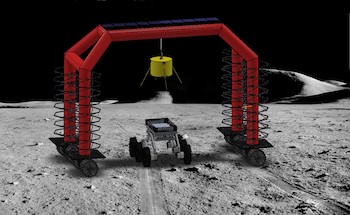
Lunar- Transporter and Gantry (L-TAG) by Team AA-Star
Modular Lunar Cargo Handling System by Team Sparkletron
Truss Manipulator by Wendell Chun
Finalists
Charlotte by Thomas Gibson
Lunar-MULE (Mobile Unmanned Loading Elevator) Rogelio Morales by Ingenuity Tree
Oooo The Claw by Ooooo The CLAW Team
Project Bowstring: A Slide to the Surface by Amelia Rolf
Smart FOX by Santiago Forcada Pardo
Tritron Lunar Unloading and Positioning System by Jeff Morse
We would like to take this opportunity to thank everyone who entered the challenge. While we were only able to recognize a small fraction of those who entered, there were so many other insightful solutions, we are confident that many of the participants will do great things in the future. Thank you all for helping make this challenge a huge success.
We would also like to thank all of our supporters, partners, judges, and anyone else who in any way contributed to our competition community. Without you, we would not have had the challenge that we did.
We know you are anxiously awaiting the winners' announcement for NASA's Lunar Delivery Challenge. Unfortunately, you will need to wait one more day! The announcement is being postponed until tomorrow.
Please stay tuned to find out who won the challenge!
NASA's Lunar Delivery Challenge received 224 submissions! Innovators were asked to propose a method to unload payloads from Lunar Landers.
NASA is recognizing six teams for their excellent proposals and awarding $25,000 in total prizes as well as recognizing six additional teams as Finalists.
Sign up now to meet the winners! Please join us on Zoom to meet the 1st and 2nd place teams and learn more about their solutions. Register here for the webinar on March 25th at 1 pm PDT.
1st Place Winner - $10,000 Prize
Lightweight Inflatable Delivery System (LIDS) by Lauren Fell
LIDS is an innovative, inflatable gantry with a novel rotatable crane, which makes the system compact, lightweight, and highly versatile. This cost-effective delivery system primarily consists of inflatable components, conserving weight and volume, which offers efficient loading capability. Other noteworthy features include an autonomous attachment capability that allows it to attach to a wide range of lander hatch heights, and a rotatable component that acts as a forklift, combined with a built-in winch that allows for both vertical and horizontal movement of payloads.
Lauren Fell is an avid problem solver. She first participated in NASA’s RFID-Enabled Autonomous Logistics Management (REALM) project storyboard challenge in 2017 and was instantly hooked. She won first place in that challenge and has been competing ever since. Fell has a background in psychology and is in the process of completing a Ph.D. on the application of models from quantum physics to the cognitive science of trust. She also teaches decision science as an associate lecturer at the Queensland University of Technology in Brisbane, Australia, and enjoys expanding their repertoire of skills by competing in NASA challenges.
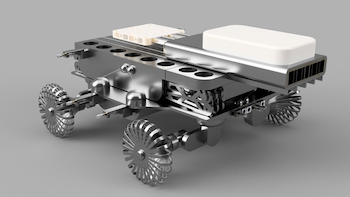
OO.A is an evolution of current Mars rover designs. The OO.A system can operate autonomously or with other systems to deliver a tough, sustainable, and flexible platform for unloading payloads of all sizes. This multifunctional design proposes simple packaging protocols that allows the lander systems to support various types of tasks, such as mining waste management and other operations across the lunar surface.
FRD is a father and son team. The idea was captained and designed by Fenton Robathan and the project was managed by Peter Robathan. The OO.A system was developed at a design studio based in London that focuses on sustainable and automotive aerospace projects.
Scalable Payload Delivery System (SPaDes) by Team SPaDes
SPaDeS is based on the idea of expanding infrastructure. The design uses a small rover crane for small and medium-sized payloads, and larger payloads are handled with a crane that uses inflatable structures and lunar material. The whole system is designed to provide maximum usability and flexibility in the harsh lunar environment while optimizing structural solutions to keep the mass and volume of the system economical.
SPaDeS is a multifaceted team with expertise in mechanical engineering, design, and simulation that has come together to create new and innovative solutions, integrating both old and new technologies. Their solutions are created using open-source software, which demonstrates the overall spirit and vision of the team.
3rd Place Winners - $2,000 Prize
Lunar- Transporter and Gantry (L-TAG) by Team AA-Star
The L-TAG operates in two phases. In the first phase, an inflatable gantry crane deploys to unload the payload. In the second phase, the transporter vehicle is responsible for carrying the payload to the lunar base, which can travel at a speed of 200 meters per hour on rugged lunar terrain. The crane and vehicle can move a mass of 12 metric tons, which is important when considering larger payloads, such as hardware needed to build lunar habitats. A deployable shield around the vehicle protects the payload from lunar dust and micro-meteoroid impacts.
Team AA-Star consists of an interdisciplinary collaboration with expertise in machine design, electro-mechanical and computer science combined with commercial experience. Surya Narayana Murthy Pappala, the team captain, has a master’s degree in information technology with 12 years of experience and is passionate about problem-solving and optimization. Amareswara Pasad Chunduru has a degree in computer applications and expertise in electro-mechanical engineering and is passionate about non-linear dynamics, machine design, and metaheuristics. Sai Ashish Kumar Karanam has a master’s degree in machine design as well as commercial experience and is passionate about product life cycle management, industrial robotics, and Internet of Things devices.
The Modular Lunar Cargo Handling System consists of function-specific modules that can robustly manage complex challenges on unpredictable terrain over a range of temperature conditions. Cable-tensed structures and thin-film based electrostatic adhesion surfaces offer high strength-to-weight ratio, lowering costs and enabling unit redundancy. Palletized cargo is manipulated by replaceable, damage-tolerant couplings steered by machine vision, increasing mission success probability. Complex autonomous behavior is enabled by combining simple error-correcting interfaces between subsystems.
Team Sparkletron is an innovative technology team that uses combinations of proven techniques and principles to achieve new goals. Team Captain, Kenji Larsen, is a prototyping engineer. Other team members include daughters Emily, age 6, and Natalie, age 8, who played an integral part in the design process, learning critical decision-making skills and developing optimizations based on practical methods.
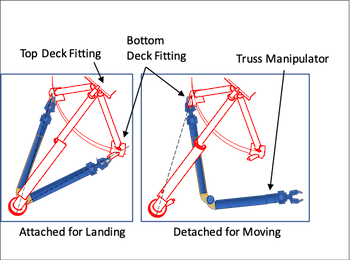
The Truss Manipulator is a multi-purpose solution that starts as a lander leg truss structure that is repurposed to a manipulator that can take advantage of the lower lunar gravity to move objects around. This “truss-like manipulator” is needed for landing as part of a structural compression element integrated into the lander’s leg assembly, so it does not take up additional payload space. Once landed, the arm will unlatch from the primary lander leg and is free to travel about the lander.
Professor Chun is the faculty director of systems engineering at the University of Denver. He is a former aerospace principal investigator for Lockheed Martin Corporation and has worked in robotics since the 1980s, with artificial intelligence systems and robotic manipulation systems, including self-driving vehicles. Professor Chun specializes in multi-disciplinary engineering design to address complex problems.