The next era of lunar exploration demands a new kind of wheel - one that can sprint across razor-sharp regolith, shrug off extremely cold nights, and keep a rover rolling day after lunar day. The Rock and Roll with NASA Challenge seeks that breakthrough. If you can imagine a lightweight, compliant wheel that stays tough at higher speeds while carrying lots of cargo, your ideas could set the pace for surface missions to follow.
For this phased Challenge, Phase 1 rewards the best concepts and analyses, Phase 2 funds prototypes, and Phase 3 puts the best wheels through a live obstacle course simulating the lunar terrain. Along the way, you’ll receive feedback from NASA mobility engineers and the chance to see your hardware pushed to its limits. In Phase 3, to prove concepts, NASA is using MicroChariot, a nimble, 45 kg test rover that will test the best designs from Phase 1 & Phase 2 at the Johnson Space Center Rockyard* in Houston, Texas.
Whether you’re a student team, a garage inventor, or a seasoned aerospace firm, this is your opportunity to rewrite the playbook of planetary mobility and leave tread marks on the future of exploration. Follow the challenge, assemble your crew, and roll out a solution that takes humanity back to the Moon.
*Please note that in the prelaunch stage of this challenge, a wheel diameter of 19-inches was stated. This has since been updated to 18-inch wheels, which is the official measurement for this challenge, going forward.
Photo Credit: Copyright Felix and Paul Studios
Guidelines
Design a compliant, lightweight wheel that attaches to MicroChariot, survives lunar extremes, and propels a rover at speeds up to 24 km/h over jagged terrain - all backed by your solid analysis and a build-ready plan. Deliver the idea, the CAD, and the evidence it works, and you are on the right path for NASA to give you the proving ground to show the world it can roll on the Moon.
Background
NASA is returning crews to the Moon to establish an enduring, science-driven presence that will serve as the springboard to Mars. The agency’s Moon-to-Mars Architecture lays out a phased campaign (see challenge Resources): the Human Lunar Return Segment will test critical systems; the Foundational Exploration Segment scales up surface infrastructure; the Sustained Lunar Evolution Segment will use equipment currently being developed to create the lunar outpost, and; the Human to Mars Segment will extend operations into deep space and, ultimately, the Red Planet. In this framework, every new element - rockets, landers, habitats, spacesuits, mobility systems - must mesh like parts of a living ecosystem, each enabling the next stride outward.
Central to that ecosystem is mobility, and innovation in mobility will be key to maximizing exploration returns. The first wheels that carried astronauts on the lunar surface, in 1971, instantly tripled the exploration range and proved that a few kilograms of smart engineering could unlock kilometers of new science. Half a century later, the mobility and logistics scope has grown by orders of magnitude. Artemis cargo landers will drop equipment at sites in the polar highlands; scientific campaigns will demand daily sample runs into cratered darkness; crews will need quick lifts between power stations and habitats. All this motion is enabled through wheels.
The challenge is a constant trade among traction, mass, materials, and durability. A new generation of wheel technology must be lightweight, compliant, robust, and scalable. These attributes underpin every ambitious surface scenario in the Moon-to-Mars roadmap.
On the Moon, the terrain is unforgiving. No roads - just sharp, electrostatically charged regolith ready to punish the unprepared. NASA’s rover engineers know that no vehicle is better than the tires it rides on. Sharp regolith abrades wheels, large temperature swings thermally stress components, and 1/6 gravity results in wheels having less traction. Rigid spoke wheels, like the ones qualified for Volatiles Investigating Polar Exploration Rover (VIPER), can crawl confidently at a slow pace, but at the higher speeds necessary to support human exploration, rigid spoke wheels are not optimal. A compliant, lightweight wheel is mission-enabling, reduces maintenance, and allows for faster pace operations - just as we have found here on Earth.
NASA and NASA partners are actively developing wheel technologies to meet the mobility demands of future lunar missions. Crowdsourcing will expand the community of solvers and invite fresh thinkers to surface “hidden-gem” technologies, materials, and compliance strategies to fully explore the design space. Concepts will be down-selected, prototyped, mounted to the MicroChariot test rover, and tested at a NASA facility.
For solvers, the mandate is clear: re-imagine the wheel for the lunar environment, that moves faster and works longer than anything created to-date. Innovation counts, but so does manufacturability, mass efficiency, durability, and performance.
The Problem
Existing lunar rover wheels - engineered for low-speed, short-duration missions - cannot endure higher speeds, long lifetimes, and abrasive regolith of upcoming Artemis logistics operations.
As NASA prepares to ferry cargo between South-Pole landing zones and work sites kilometers away , it lacks a wheel that can survive the journey. The agency’s latest analysis of cargo mobility calls for traverses on slopes up to 20° and repeated runs at higher speeds to support the expected operational cadence. The Apollo LRV wheels, although successful, do not meet the current demands for sustained exploration. Higher speeds yield larger dynamic loads and increased probability of impacts with rocks and craters, due to poor visibility and shorter reaction times to avoid obstacles. Also, long service life results in repeated mechanical and thermal stresses. Therefore, non-rigid wheel technologies suitable for higher-speed, longer duration mobility are needed to meet the demands of future lunar missions.
The Lunar Environment
The Moon presents a landscape of thermal extremes with surface temperatures that vary with latitude and solar illumination. The Equatorial region can reach +121 C (250 F), representing the warmest extreme. Conversely, permanently shadowed regions (PSRs) can experience extreme cold temperatures of as low as -255 C (-427 F).
Artemis will primarily focus on the lunar south polar region (~80 to 90 degrees latitude) due to the unique scientific and operational opportunities it provides. Unlike the equatorial region of the Moon, visited by Apollo, which follows a cycle of approximately 14 earth days of light followed by 14 Earth days of night, in the polar region the Sun appears to skim the horizon, circling the Moon's pole through a short range of altitudes. The combination of this low solar angle and the topography of the surface create sustainable exploration opportunities with locations ranging from nearly continuous sunlight throughout the year, for solar power generation, to areas that are permanently shadowed that sunlight never reaches which might yield rich natural resources. To maximize scientific and operations opportunities, mobility systems will need a wide temperature range capability.
The following table, 3.4.6.3-1 from the NASA DSNE Resource, shows that surface temperatures vary with latitude and solar illumination. The equator represents the warmest region, poles (85 deg lat) represent the coldest, and PSRs extreme cold.
Location
Mean Temperature K
1 Sigma Max or Min Temp K
Solar conditions
Equatorial maximum
391
394
Local noon
Equatorial minimum
96
94
Before sunrise
45 degree latitude maximum
350
357
Local noon
45 degree latitude minimum
89
83
Before sunrise
85 degree latitude maximum
182
224
Local noon
85 degree latitude minimum
61
41
Approx. 3am equivalent
Coldest permanently shadowed crater
18
Table 3.4.6.3-1 Lunar surface temperature extremes for various latitudes and solar illumination conditions from Williams et al. 2017. Mean temperatures are the plotted value with the max or min extremes taken from the error bars. Temperature for coldest permanently shadowed crater is from Paige and Siegler, 2016.
At the poles, illumination remains low-angle year-round, casting kilometer-long shadows that hide rocks, valleys, and craters until a rover’s tires touch them. Gravity, one-sixth of Earth’s, lets a vehicle haul heavier loads which magnifies inertia: once mass starts bouncing or sliding, it is harder to stop. The crater covered ground itself is no friendlier. Regolith dust is jagged, sharp, and electrostatically clingy; laboratory tests show they abrade metals an order of magnitude faster than terrestrial basaltic sand, working their way into joints and shaving material away with every rotation. Add micrometeoroid pitting and high-energy solar and cosmic radiation, and a wheel must endure more than just rough ground; it must withstand a barrage of thermal cycling, vacuum-induced material outgassing, and radiation-driven embrittlement.
In short, the lunar worksite is a place where a poorly chosen wheel can fracture, fatigue, dig in, or grind itself away long before the rover’s mission is done. Any solution must therefore fuse compliance (to soften impacts and maintain contact), low mass (to conserve upmass and energy), and materials toughness (to outlast dust, cold, and time).
For a full range of environmental conditions see NASA's Cross-Program Design Specification for Natural Environments (DSNE).
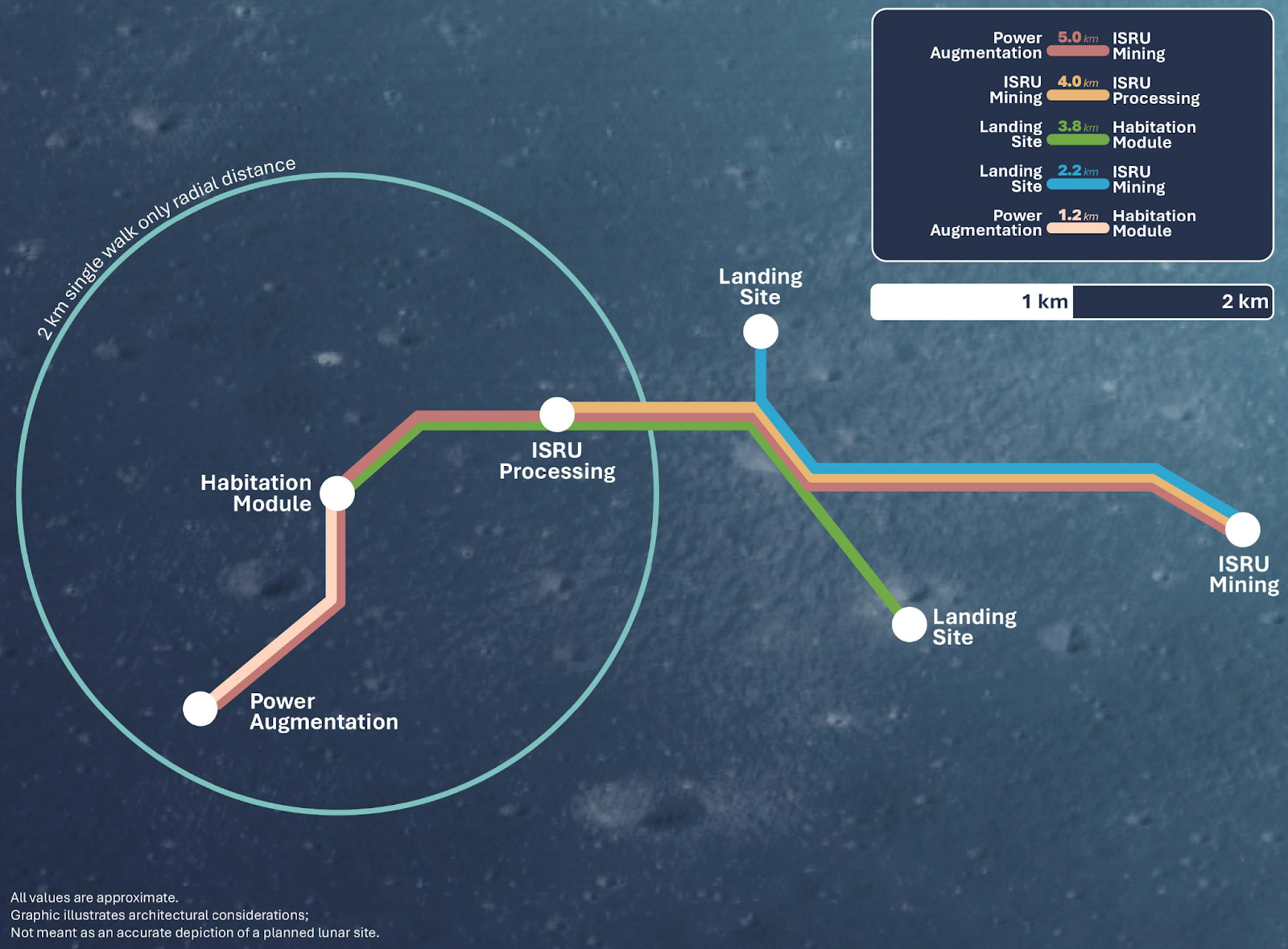
Image 1: Example traverses showing landing locations and potential end-use locations. (NASA)
The Challenge: Structure and Goal
NASA is seeking novel rover wheel concepts that will enable advances in surface mobility and human space exploration. Of interest are flexible, lightweight wheel ideas that will reduce ground pressure, and absorb impacts during higher speed operations through rugged terrain. The selected wheel concepts will be prototyped and tested on the MicroChariot rover to demonstrate the technology and inform future flight wheel designs.
This is a three-phase, down-select challenge competition. The following provides an overview of each phase. The majority of detail is currently provided for Phase 1, as it is open to the public. More details about later stages, including their full submission requirements and judging criteria, will be released to the down-selected teams later in the challenge.
The MicroChariot Test-Bed
For this challenge, NASA has selected the MicroChariot rover as the common design and test platform, but the ultimate goal is a wheel architecture that can scale to larger lunar vehicles to form a suite of wheels that support a wide range of mobility systems. MicroChariot is a semi-autonomous logistics rover conceived for day-to-day chores around the Artemis South-Pole base – hauling instruments, laying cabling, or ferrying supplies from landers to labs. Key facts:
Size & Mass (terrestrial): 1.02 m × 0.51 m × 0.18 m (40 in × 20 in × 7 in) chassis; ~45 kg (~442 N curb weight on Earth).
Payload Capacity*: ~45 kg on Earth (~442 N on Earth) ⇒ ≈ 270 kg on Moon (~442 N under lunar gravity…6× mass advantage).
Wheels**: 457 mm (18 in) diameter, 203 mm (8 in) wide, VIPER-style rigid spokes.
Ground Clearance: nominal 165 mm (6.5 in) on the lunar version; the Ground-Test Unit can adjust ±76 mm (±3 in).
Drive: fully electric, four independent wheel modules, current max speed 9.65 km/h (6 mph).
*In typical stop-start logistics duty, MicroChariot will hit dips, rocks, and have braking events that spike the wheel reaction force to as much as four times the nominal static load per wheel. Designs must therefore remain structurally sound and maintain traction under these transient peaks. All designs must meet the minimum load capacity baseline of 2 × gross vehicle lunar weight (= curb-weight + payload) distributed across the four wheels or the entire gross vehicle weight supported by only two wheels, as described in the Desired Attributes.
**In the prelaunch stage of this challenge, a wheel diameter of 19-inches was stated. This has since been updated to 18-inch wheels, which is the official measurement for this challenge, going forward.
The MicroChariot Rover and Your Design
Fit: your design must bolt onto the MicroChariot wheel hub (see diagram below) so it can be installed without changes to the wheel hub.
Function: while tuned for a 45 kg rover + 270 kg lunar payload (510 N gross rover weight or 115 lbf), your wheel should demonstrate pathways to larger diameters and loads; NASA cares about extensibility beyond MicroChariot.
Proof: success in Phase 3’s live Rockyard demonstration will showcase a wheel technology capable of raising the benchmark on lunar surface mobility.
The overarching goal is to identify, prototype, and test innovative wheel solutions that explore new designs, potentially incorporating characteristics such as lightweight, flexible, long service-life, and scalability to reduce mission risk and expand lunar exploration capabilities.
Phase 1 – Ideation (August - October 2025) Goal: Create an innovative wheel and tire design and show engineering rationale and analysis. Deliverables:
3-D CAD model of the wheel assembly ( STEP).
Whitepaper (≈ 7 pages) explaining your wheel design and how it addresses the Phase 1 desired attributes listed in the “How to Win?” section below.
Outcome: Panel of experts selects the most promising concepts (up to 10) for funding and designs move to Phase 2.
Phase 2 – Prototype (January - April 2026) Goal: Fabricate two full-scale wheels that match the Phase 1 design. Deliverables:
Wheel prototypes matching Phase 1 design (quantity 2 of same wheel)
3-D CAD model updates (STEP)
Video of assembly and testing progress
Summary of design changes, lessons learned, and potential future improvements
Deliver one wheel prototype by deadline
Outcome: Panel of experts select up to 5 teams to advance to Phase 3. Selected teams are asked to ship or bring their solutions to Phase 3.
Phase 3 – Demonstration (target: summer 2026) Goal: Demonstrate capabilities of Phase 2 fabricated wheels on MicroChariot Rover at NASA’s Johnson Space Center Rockyard in Houston, Texas.
Deliverables:
Team participation at NASA Johnson Space Center Rockyard
Presentation on wheel design in conference room setting
Deliver two wheel prototypes before Phase 3
Outcome: Panel of experts selects the most capable wheel. Additionally, all wheel designs showing promise will be shared within the NASA community for possible additional testing and use in future missions.
Prizes
Phase
Prize Type
Number of Prizes Possible
Amount per Prize
Total Prize Amount
Phase 1
Phase 1 Finalist
10
$10,000
$100,000
Categorical*:
Engineering Excellence, or
Innovation in Design
5
$1,000
$5,000
Phase 2
Mid-phase “bench test “ bonus
10
$1,500
$15,000
Phase 2 Finalist**
5
$5,000
$25,000
Phase 3
Phase 3 Finalist
1
$10,000
$10,000
Total***
$155,000
*The distribution of Phase 1 categorical prizes across the two categories will be determined during judging. Phase 1 finalists are eligible to win categorical prizes in addition to finalist prizes. Those that win only categorical prizes will not participate in Phase 2.
**All Phase 2 participants will ship at least one wheel prototype to NASA. Winners will ship or bring their wheels to Phase 3.
***Prize funds can be used at the discretion of the winners and can be used for travel and shipping of solutions; shipping and travel costs are at the expense of the winners.
Timeline
Pre-registration begins
July 15, 2025
Open to submissions
August 28, 2025
Submission deadline
November 4, 2025 @ 5pm ET
Judging
November 5 to December 12, 2025
Winners Announced
December 18, 2025
Phase 2
January - April 2026
Phase 2 Judging
April/May 2026
Phase 3
May - June 2026
Phase 3 Live Demonstration
July 2026
How to Win?
To be eligible for an award, your proposal must, at minimum:
Satisfy the Judging Criteria requirements.
Thoughtfully address the Submission Form questions.
Be scored higher than your competitors!
Ready to answer the challenge? Below are the key pieces you need to submit to Phase 1.
The following requirements must be met to be considered for a Phase 1 Finalist prize:
Must-Have Requirements
Compliant design: wheel structure must flex to absorb obstacle impacts and reduce peak loads, while operating at speeds up to 24 km/h (15 mph) on lunar-simulant terrain.
Hub integration: no part of the concept may intrude into a central keep-out (see hub diagram (Image 2) for measurements); attachment to the outer hub surface is allowed.
Phase 1 package: submit a STEP 3-D CAD model and approximately 7-pagewhitepaper detailing innovation, compliance mechanism, expected performance, materials, construction method, mass estimate, and preliminary analysis or test data.
Phase 1 Desired Attributes (Scored Advantage)
The following elements are desired, in addition to the must-have requirements:
Low mass: target less than 2.3 kg (5 lb) per wheel while maintaining strength.
High strength-to-weight ratio: use analysis and material data to justify claims.
Geometry: outer diameter 483 mm (18 in) and width 203 mm (8 in). Please note that strict geometry is not a hard requirement for Phase 1 submissions. However, being able to adapt your design to meet the geometry requirement in Phase 2 will be required. Therefore, if your Phase 1 design does not already meet these requirements, you should demonstrate in your plan how you intend to adapt the design in Phase 2.
Innovative: clearly distinct from publicly documented compliant tire technology, including but not limited to the Apollo LRV wire-mesh tires and the Spring Tires.
Dust tolerance: self-clearing tread or geometry that limits regolith intrusion.
Lunar environment compatibility: materials and construction must function over a large temperature range, in vacuum, abrasive dust, and on uneven terrain. Please note wheel designs able to withstand the broadest range inclusive of Moon polar region (~80-90 degrees latitude) temperatures will be given preferential ranking and those including the extremes of PSRs will be ranked even higher.
Scalability: concept can be adapted for various sizes and varying loads.
Compliance: designed to absorb obstacles at speed up to 24 km/h without structural damage and minimize ground pressure. Please note that wheels able to withstand larger rocks at higher speed and have lower ground pressures will be given preferential ranking.
Load capacity: solvers should strive for higher load capacity designs to account for dynamic loading associated with desired higher speed operations. The minimum load capacity for this challenge will be 256 N per wheel. This is determined by a calculation of 2 × MicroChariot’s lunar gross mass (≈ 45 kg rover + 270 kg payload) distributed across four wheels under lunar gravity. This force is intended to cover expected loads under quasi-static driving conditions (i.e., slow speeds, weight distributions) and represents the minimum bar for this challenge. Solutions that can withstand larger masses, drive at greater speeds, or with greater load distribution variability, will be given preferential ranking.
Traction: propel rover over 20° slopes, rocks, crater rims, and in loose soil. Please note that proposals that demonstrate the likelihood of higher tractive performance will be given preferential ranking.
Simplicity: few parts, minimal fasteners, straightforward assembly, low-maintenance, uses broadly available materials and standard fabrication techniques. Provide a rough cost for the manufacturing of a single wheel of your design.
Long service life: target design life up to 1,000 km in lunar environment. Please note that proposals that demonstrate the likelihood of a longer wheel service life will be given preferential ranking.
Submissions that meet all Must-Have items will be judged competitively on the Desired Attributes they achieve and how well those strengths are documented in the whitepaper.
Judging Criteria
Submissions will be assessed based on the following factors. As this is a down-select challenge, detailed phase 2 and 3 judging criteria will be released to phase 1 and 2 finalists at the start of each subsequent phase.
Phase 1 (Ideation) Criteria:
Criterion
Sub-criterion
Description
Weight
1 Innovation (25%)
—
How
original is the concept?
game-changing is the concept?
does the concept compare to state of the art?
does the concept differ from existing wheel solutions?
does the concept approach the challenge in new ways?
does the wheel use technology in new ways?
25 %
2 Engineering Performance & Feasibility (45%)
Mass / Strength / Durability / Robustness
How
light is the wheel?
is the strength-to-weight-ratio compared to traditional wheels?
strong is the wheel?
does the design keep mass low while maintaining strength?
durable is the wheel?
does the wheel maintain functionality after dynamic impacts?
does the wheel handle operational vibrations?
does the wheel handle launch loads and launch vibrations?
does the wheel operate and perform after the most likely failures occur?
does the design prevent hazards at failure?
15 %
Performance
How well does the wheel
perform on varying lunar terrains?
traverse obstacles?
perform at low speeds?
perform at high speeds?
traverse rocks at high speeds?
comply with the terrain?
handle lunar temperatures?
achieve a long lifetime?
handle cyclic loading?
minimize ground pressure?
minimize regolith buildup?
perform with light loads?
perform with heavy loads?
8 %
Lunar Environment Tolerance
How well does the wheel withstand
low lunar temperatures?
extremely low temperatures experienced in lunar permanently shadowed regions (PSRs)?
high lunar temperatures?
the vacuum of the lunar atmosphere?
thermal cycling?
the dusty lunar environment?
radiation?
8 %
Scalability
How
is the wheel made larger?
is the wheel made smaller?
does the wheel’s performance change with size?
does the wheel’s complexity change with size?
large can the wheel be made?
small can the wheel be made?
does the wheel’s manufacturability change with size?
7 %
Technical Feasibility
How feasible is it to
build the wheel?
source materials for the lunar wheel?
source materials for the prototype wheel?
do analysis on the wheel?
test the wheel?
make a dynamic simulation model of the wheel?
understand the risks associated with the wheel?
7 %
3 Manufacturing & Prototype Integration (20%)
Simplicity, Manufacturability, and Materials
How
simple is the wheel design?
easy is the lunar wheel to manufacture?
easy is the prototype wheel to manufacture?
easy is the wheel to assemble?
easy is the wheel to maintain and repair?
many unique parts are required for the wheel?
many custom parts are required for the wheel?
available are the manufacturing facilities required to make the wheel?
universal is the wheel to mounting location on rovers (are the wheels directional?, are there front and rear wheels?, etc.)
9%
Cost
For the prototype wheel, how
expensive will it be to manufacture?
long will it take to manufacture?
readily available are the materials?
long will it take to assemble?
difficult will it be to ship to NASA?
For the lunar wheel, aka the “flight wheel”, how
expensive will it be to manufacture?
long will it take to manufacture?
readily available are the materials?
long will it take to assemble?
3 %
Fit to MicroChariot
How well
will the prototype wheel fit on MicroChariot?
is the wheel mounted to the MicroChariot Hub?
does the wheel utilize the MicroChariot Hub Mounting Pilot Interface?
does the wheel utilize the MicroChariot Hub Mounting Pin Interface?
does the wheel clearance holes align with the MicroChariot Hub Mounting Bolt Interface?
is the keep-out-zone modelled in CAD?
is the MicroChariot Hub modelled in CAD?
8 %
4 Prototype Plan & Team (10%)
Development Plan
How thorough and realistic is the development plan to
create the prototype wheel in Phase 2?
test the prototype wheel for Phase 2?
demonstrate the prototype wheel for Phase 3?
meet the milestones and delivery deadlines within Phases 2 and 3 timelines?
6 %
Team Capability
How well has the partnership/team
organized?
defined roles and responsibilities?
assembled the necessary skills and facilities to create the prototype wheel?
prepared to participate in Phase 3 activities at NASA?
positioned themselves for success?
4 %
Phase 2 (Prototype) Criteria: Evaluation will assess the functionality of the delivered prototype, the quality of construction, adherence to the submitted design, and results from any self-conducted testing or demonstration via video submission.
Phase 3 (Demonstration) Criteria: The primary evaluation will be based on the prototype's performance during the live demonstration at the NASA Rockyard and the team’s presentation of their wheel development. The Rockyard Evaluation includes results from durability testing and traction performance to propel the vehicle and traverse obstacles.
Submission
Phase 1 (Ideation) deliverables are a CAD model and whitepaper (approximately 7 pages). Your deliverables will be submitted via electronic form and will need to provide the following information:
Title
Two-sentence short description
Publicly releasable abstract that introduces your team and your idea without revealing proprietary details
Objective measurements of your wheel’s design and its projected performance, including Mass Budget using format provided in Table 1 and Speed vs Rock Size performance using format provided in Table 2
Note for Mass Budget: The confidence level columns in the provided mass budget table are included to capture and understand your confidence in the various components’ masses, based on your research and assumptions, see example entries in Table 1 below.
Note for Speed vs Rock Size: The values in the table are meant to indicate the speeds at which your wheel can operate while rolling over various size rocks and under various loads. The rock size of 0 indicates maximum speed. For example, “⅛” indicates rolling over a rock that is ⅛ the diameter of your wheel.
Narratives to support and justify stated measurement projections, and to address Phase 1 Desired Attributes and the sections outlined in the Phase 1 Judging Criteria
Note: Narrative sections are organized to follow Judging Criteria - Phase 1 (Ideation) Criteria structure and thus inputs should use questions in criteria as guidance to inform responses.
CAD model
Optional images
Curriculum Vitaes (CV) or Letters of Support (if applicable)
Link to a short build and/or simulation video (if applicable)
Part name
Part description
Unit mass (kg)
Quantity
Mass total (kg)
Confidence level
Actual=±0%
High=±5% Med=±15% Low=±30%
Lower mass total
(-) (kg)
Upper mass total
(+) (kg)
Part A
Part A description
0.24
2
0.48
Low
0.34
0.62
Part B
Part B description
0.17
4
0.68
High
0.65
0.71
Part C
Part C description
0.15
6
0.90
Med
0.77
1.04
Part D
Part D description
0.13
1
0.13
Actual
0.13
0.13
2.19
1.88
2.50
Table 1: Mass Budget Table with example entry
Rock Size (as a fraction of your wheel diameter)
Speed at half-load rating (km/h)
Speed at full-load rating (km/h)
0 (level lunar terrain)
1/8
1/4
1/2
Table 2: Speed vs Rock Size Table
Phase 2 and 3 submission requirements will be provided to phase Finalists at the start of each subsequent phase.
Rules
Participation Eligibility:
The Prize is open to anyone age 18 or older participating as an individual or as a team. Individual competitors and teams may originate from any country, as long as United States federal sanctions do not prohibit participation (see: https://www.treasury.gov/resource-center/sanctions/Programs/Pages/Programs.aspx and https://www.acquisition.gov/far/52.225-5). If you are a NASA employee, a Government contractor, or employed by a Government Contractor, your participation in this challenge may be restricted.
Submissions must originate from either the U.S. or a designated country (see definition of designated country at https://www.acquisition.gov/far/part-25#FAR_25_003), OR have been substantially transformed in the US or designated country prior to prototype delivery pursuant to FAR 25.403(c).
Submissions must be made in English. All challenge-related communication will be in English.
You are required to ensure that all releases or transfers of technical data to non-US persons comply with International Traffic in Arms Regulation (ITAR), 22 C.F.R. §§ 120.1 to 130.17.
No specific qualifications or expertise in the field of rovers is required. Outside individuals and non-expert teams to compete and propose new solutions.
To be eligible to compete, you must comply with all the terms of the challenge as defined in the Challenge-Specific Agreement.
Intellectual Property
HeroX will provide prize-winning solutions to the government under unlimited rights as specified in clause FAR 52.227-14 Rights in Data–General (April 2015). Unlimited rights means the rights for the Government to use, disclose, reproduce, prepare derivative works, distribute copies to the public, and perform publicly and display publicly on the web or elsewhere, in any manner and for any purpose, and to have or permit others to do so.
You may be required to complete an additional form to document this license if you are selected as a winner.
Registration and Submissions:
Submissions must be made online (only), via upload to the HeroX.com website, on or before November 4, 2025 at 5pm ET. No late submissions will be accepted.
Selection of Winners:
Based on the winning criteria, prizes will be awarded per the weighted Judging Criteria section above.
Judging Panel:
The determination of the winners will be made by HeroX based on reviewby relevant NASA specialists.
Additional Information
By participating in the challenge, each competitor agrees to submit only their original idea. Any indication of "copying" amongst competitors is grounds for disqualification.
All applications will go through a process of due diligence; any application found to be misrepresentative, plagiarized, or sharing an idea that is not their own will be automatically disqualified.
All ineligible applicants will be automatically removed from the competition with no recourse or reimbursement.
Innovator is responsible for shipping prototype in Phase 3. International participants are required to manage all requirements regarding US customs for Phase 3 shipping of solutions. Prototypes will not be returned.
No purchase or payment of any kind is necessary to enter or win the competition.
In Phase 2 the teams will develop their prototypes in preparation for testing in Phase 3.
We would also like to recognize the following honorable mentions who will share in the $5000 Categorical Prizes. While these teams will not be advancing to the next stage, we would like to commend them for their excellent submissions:
And just like that, it’s over! Thank you to all of you who sent in submissions. We can’t wait to finally see what you’ve been working so hard on.
Crowdsourcing would be nothing without the crowd — that’s you! Thank you for being an indispensable part of this process, and using your brainpower for the greater good.
Congratulations on completing your submission. This is not an easy process, and you deserve a pat on the back for your hard work and dedication. Thank you!
It’s almost over! You have eight hours left to send in your Rock and Roll with NASA submission.
Be sure to get your submission in well before the deadline. We don’t want you to have put all this work into your project, only to miss the deadline by a hair. Please send it in no later than 5 pm Eastern Time today, Nov 4th.
Good luck finishing up your submissions! We can’t wait to see all of your hard work.
The time has almost come! You now have two days left to finish your Rock and Roll with NASA submission. The final project is due on Nov 4th at 5pm Eastern Time.
We don’t accept any late submissions, so now is the time to make sure that everything is good to go. Double check file formats and make sure that all of your project components are easily accessible.
We are more than happy to answer your last-minute questions about the submission process. Post a question in the forum or leave a comment on this post, and we will be in touch with you.
We can’t wait to see the final projects. Good luck!
This is your one week warning! The final submission deadline is on Nov 4 5pm Eastern Time (New York/USA). No late submissions will be accepted, so make sure to give yourself plenty of buffer time.
If there’s anything you’re unsure about, there is still time to ask for help. Post on the discussion forum or leave a comment on this post. We’ll keep an eye out for your questions.
We can’t wait to see what you’ve been working on. Best of luck finishing up your submissions!