The Different Categories and Types of Lander Design
NASA is working with its commercial partners on two categories of lunar landers - crew rated landers for the Human Landing System (HLS) Program and uncrewed landers for the Commercial Lunar Payload Services (CLPS, pronounced as "clips") initiative. Within each of these groups are a wide range of different lander concepts of varying size, shape and design for different cargo/payload deliveries and mission scenarios. In order to support NASA’s mission to deliver cargo to the moon, the cargo-handling system has to be versatile. The key point for competitors is that NASA and their industry partners have yet to define exactly what the final lander or landers will look like as they are still in the development stage and consequently unloading and cargo handling solutions must account for variability in lander design. Entries to NASA’s Lunar Delivery Challenge will therefore need to consider a number of factors and make some assumptions. Competitors may reference three different height ranges for unloading. Those ranges are 0-4 meters (0-12 ft.), 4-10 meters (12-30 ft.), and 10 meter (30 ft.) or greater. The cargo-handling system should be able to support the three different ranges, or assumptions could be made to optimize a system for one or two of those ranges. Let’s look at the HLS and CLPS concepts and draw some conclusions that may help competitors with their unloading solutions.

Human Landing Systems
Three US companies have been shortlisted for the HLS. These are Blue Origin-led team, Dynetics and SpaceX. As you can see from the images, the three designs are very different and any solution for unloading humans and cargo from these crewed landers will need to be able to support the range of landers or make the case to optimize for just one or two of them. For example, consider the height of the payload from the lunar surface. The Dynetics design places the payload quite close to the surface whereas the SpaceX design has it much higher with the Blue Origin Team concept somewhere in between. In these concept images, the primary payload is the pressurized volume for the crew, but that may not always be the case. The room for humans or robots to maneuver cargo loads is also very different on each of the designs so any unloading system will need to take this into account.
Commercial Lunar Payload Services
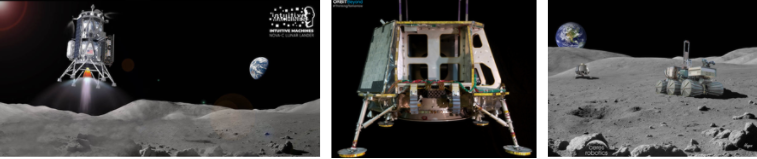
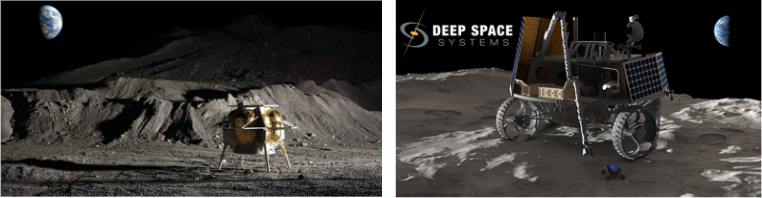
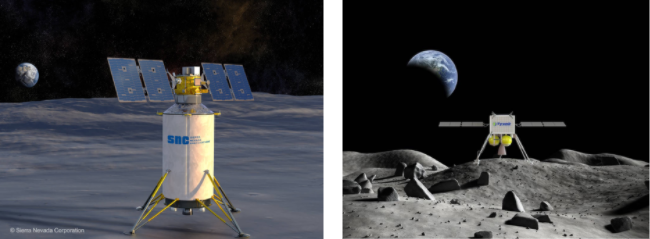
CLPS landers are even more diverse with fourteen companies requested by NASA to develop solutions. Details on the companies and their designs can be found on the NASA CLPS webpage and we encourage you to look into each of the commercial partners’ own websites for more details. The variation in designs is more apparent here as the landers are not crewed and therefore there is no requirement for life support systems or to design hatches and payload areas for humans or position access points for astronaut ease of entry/exit.
The Challenge Guidelines give some detail on the weight, volume and class of payloads that will need to be offloaded (the so-called ‘black boxes’) so there is no need to make assumptions on these although volume will be a key factor that competitors will need to address based on NASA’s description of the payload types for each weight category. Competitors can also assume that the lander will be on a reasonably level surface within a few degrees of tolerance although clearly robust designs able to deal with sub-optimal conditions would be preferred. The firmness of the lunar surface may also be a factor for some designs and competitors should state whether their solution requires a firm surface or whether it can operate in a range of regolith conditions and uneven terrain.
The fourteen CLPS lander concepts selected by NASA vary greatly in the height of the cargo location, the mass and volume of payloads the lander can accommodate, and the operating concept. Pictures of some designs have been used to illustrate this blog. There are low slung lander designs, elevated flat decks to single-stage descent and ascent modules. These landers are great representations of what types and sizes may be expected to offload cargo onto the lunar surface but NASA is not limited to these specific models. Whatever baseline lander and payload are selected for the design, it is recommended that assumptions and limitations are documented in your submission in order to remain competitive.
Advice for Competitors
First and foremost, competitors should consider the three height ranges of lunar landers within this challenge. These are:
- 0-4 meters (0-12 ft.),
- 4-10 meters (12-30 ft.), and
- 10 meter (30 ft.) or greater
Competitors will need to decide whether their solution is matched to a single height range or whether it is versatile enough for other heights as well.
Secondly, competitors will need to clearly state the assumptions and limitations of their design. For example, stating that their solution will only work for payload mounting locations less than 2m from the lunar surface. Or perhaps, that it is designed for 4-10 meter high top-loading elevated deck systems only. NASA is not necessarily looking for a solution that will work with all of the HLS and CLPS designs, although the flexibility of the design to work with a diversity of landers is worth 10% of your final score. Partial solutions or even solutions that work with just one lander type will also be considered.

A Diversity of Designs allows a Diversity of Solutions
As Tracy Gil, NASA’s Engineering Project Manager for this challenge said in a recent interview with HeroX:
“There is no better time to design in flexibility and evolution into a system than at the beginning of that process.”
This means the many potential systems are still diverse and varied and this provides a huge opportunity to HeroX solvers. With NASA yet to select the final design, it could be your innovative payload handling concept that proves to be the deciding factor on which system or systems are heading to the moon. Do not be daunted by the diversity of different landers. This diversity is deliberate and aimed at allowing dynamic feedback to NASA and the greatest possible range of options to be considered early in the process. The solutions presented by HeroX solvers will help shape the final designs. So, in summary:
- Make sensible assumptions based on the preliminary designs presented.
- Full solutions for all lander types through to partial solutions for a single design will all be acceptable entries.
- Read the Challenge Guidelines and Resources page thoroughly and check out the company websites for the CLPS and HLS landers.
- Good Luck!